Date:– 31/01/2020

What is Grocubator ?
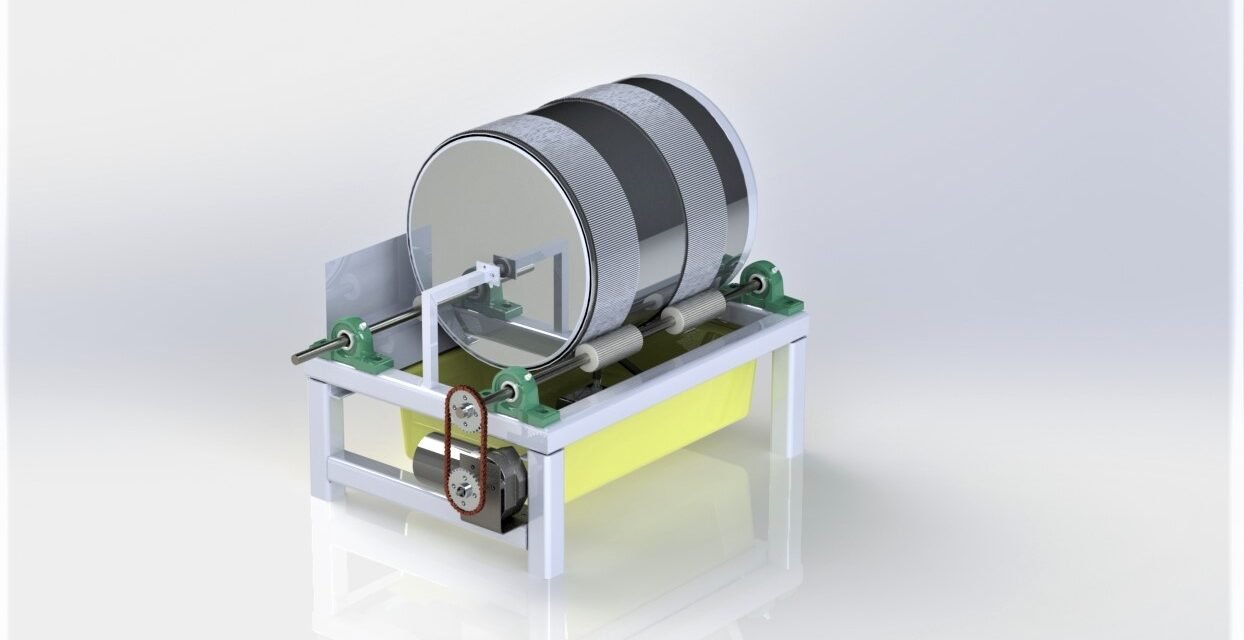
It is basically a smart, medium-sized incubator for sprouting legumes and seeds. It can soak seeds as well and recycle the same water throughout the entire process. The Grocubator will work on the same traditional steps, so its products will be completely organic. The intention of this is just to reduce repetitive tasks and the effort required for producing buck quantity. The hand behind this setup is Mr. Rahul Kanojia [Vigyan Ashram Fabacademy] Blog Link – (http://fabacademy.org/2021/labs/vigyanashram/students/rahul-kanojia/index.html).
After that project was developed by @nachiket-adamane ( Blog Link – http://vadic.vigyanashram.blog/2021/09/17/grocubator-v2/ )
Design 2kg sprouting system for Vigyan Ashram kitchen with engineering consideration and by eliminating issues with Grocubator version 1.
- Problem Listed For Grocubator Version 2: Trail 1:
- Issue 1: As in trial, we identified the issue with an exact 180-degree rotation of the vessel. In the system, we calculated the time delay for 180-degree rotation, but due to a slight change in the degree of the 1st cycle, it led to a large change in further repetative cycles.
- Issue 2: The wiper motor shaft slipped while in trial because of the motor’s having been used before and the threads on the motor shaft were not properly tightened, so due to repetative cycles, the attachment of the motor shaft and mounting slipped at contact.
- Issue 3: Water leakage through the vessel lid

Previously, we only took a single trial, so we have to take a further trial for more clarification of issues in the system by overcoming existing issues in the system.
Date: January 02, 2022
- Issue Resolved : To remove slippage we tried to create a grub screw arrangement to hold the shaft properly in to the sproket.




Before Trail, we eliminated motor shaft slippage issues i.e because the motor is used before and the threads on the motor shaft are not proper so due to repetitive cycles the attachment of the motor shaft and mounting slipped at contact.
- Trail 2 : Again sprouting a 2Kg Mataki for VA kitchen
Date: 01/02/2022, Time: 8:30

- System load with 14 liters of water in the water tub and 2 kg of rinsed Mataki in the aluminum vessel.
- The system starts exactly at 8:30.
- The system was run very well, and the water pump started after 2 hours of soaking.
- After 2 hours, the system rotates down well without slippage & the further process is continued.
after 10 hrs
- Issues while on trail:
- After 2 to 3 cycles, the vessel angle slightly shifted due to the minor change in angle for every rotation.
- I think we can fix this by using a limit switch to stop the motor at the required position by positioning the limit switch.
- water leakage through the vessel lid.




Date 05/02/2022
- Trail 3 : Again sprouting a 3Kg Hugle for VA kitchen
- system load with 14 liters of water in the water tub and 3 kg of rinsed hulge in the aluminum vessel.
- The system starts exactly at 10:40 pm.
- The system was running very well, and the water pump started after 2 hours of soaking.
- After 2 hours, the system rotates down well without any slippage & the further process is continued.



- Issues while on trail:
- After 2 to 3 cycles, the vessel angle slightly shifted due to the minor change in angle for every rotation.
- water leakage through the vessel lid.
- This causes metal body corrosion due to water falling on the body. This water also mixes with the vessel water.
- water dropdown on moter.


so I want to decide first hole body painted and to make a cover for all water lie down on vessel also protect the motor from water.
first, a big task for me is how to make the cover and which type of material I use. so I thought and discussion with Ghanshyam.


Then I used PVC pipe. This pipe is heated with a hot air gun. This pipe changes into a flat sheet. This flat sheet is used for the cover.
After that, this planning sheet is heated and changed into that shape, or whatever the required shape is.

preparation for painting
- Dismental all the part.
- remove the corrosion on body by granding mechine.
- once agian clean body with sand pepar.
- paint on first red oxicide.
- After that clour paint apply on the body.

All component dismental and grading hole fream remove corossion.


First I painted red oxide on the frame. Then, I painted the grey color.

15/02/2022
Assemble all the parts.

Issues:- we identified the issue with an exact 180-degree rotation of the vessel. In the system, we calculated the time delay for 180-degree rotation, but due to a slight change in the degree of the 1st cycle, it led to a large change in further repetitive cycles.
how to resolve this issue:- we decided to use an IR sensor to solved this problem.
what is an IR sensor how to its works?
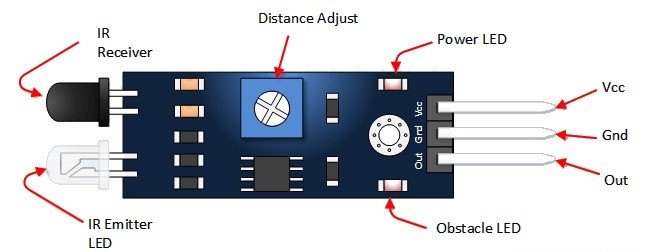
The IR LED (transmitter) emits IR light, which is reflected at the object and received by the IR receiver (photo diode). As the distance between you and the object changes, the amount of reflection and reception changes as well. Through the IR input, this discrepancy generates a change in input voltage. We take note of these ideas and apply them to our efforts. Our proximity sensor looks like this. This principle is illustrated in the diagram below.

How to work and how to detect color.
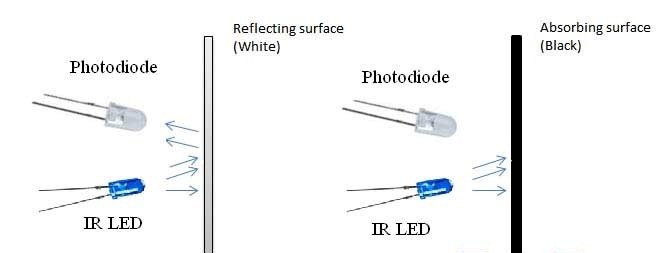
The amount of reflected light is also determined by the color of the surface it is reflected from. Black is believed to be the ideal absorber, while white is said to be the ideal reflector. Different colors will have different reflections. Therefore, turn it into a color detector.
This principle I use works on my system, so first I use black tape. This black tape stick is on in system drum 180 angel.

Also, add their sensors to the system.

After Suvarna helps with the system programming code for the system work, it is all set up and ready to go.
Code
//Grocubator Process Code
//DIC Vigyan Ashram, Pabal
//
int cycle;
int timer=0;
int water_pump =8;
int motor = 9;
#define IR 7
bool ir_val = 0;
void setup() {
Serial.begin(9600);
pinMode(water_pump, OUTPUT);
pinMode(motor, OUTPUT);
pinMode(IR, INPUT);
for(cycle = 0; cycle < 1; cycle++)
{
Serial.println("Cycle 0 Begin");
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 150 seconds
// ................................................... Step 1
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(50);//1000
Serial.print("Water Pump ON for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
for(timer = 0; timer < 100; timer++) //// 2 hours undisturb //7200
//...................................................... Step 2
{
delay(50);
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
/* digitalWrite(motor, HIGH);
Serial.println("Motor OFF...");*/
for(timer = 0; timer < 100; timer++) ///// Draining time of 5 minutes //300
//........................................... Step 4
{
delay(50); //1000
Serial.print("Draining time: ");
Serial.print(timer);
Serial.println(" Seconds.");
}
timer = 0;
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
//........................................... Step 5
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");
}*/
for (cycle = 1; cycle < 25 ; cycle++)
{
Serial.print("Cycle ");
Serial.print(cycle);
Serial.println(" begins");
for(timer = 0;timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 6
{
delay(50); //1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/* for(timer = 0; timer < 5; timer++) //// Water motor dowwn for 5 seconds
//................................................... Step 7
{
digitalWrite(motor, LOW);
delay(1050);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH);
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor up of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 8
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
//...............................................Step 9
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 10
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation down of Vessel for 5.5 seconds
// ........................................... Step 11
{
digitalWrite(motor, LOW);
delay(1050);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
//timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
// ............................................... Step 10
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
// ........................................... Step 11
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
if(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
digitalWrite(motor, LOW);
delay (3200);
digitalWrite(motor, HIGH);
}
timer = 0;
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 50 seconds
//................................................... Step12
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(1000);
Serial.print("Water Pump ON for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
///// Return to Step 6 and Looping////////
}
}
}
// the loop function runs over and over again forever
void loop() {
} I uploaded this code onto the system and tested whether it worked or not. but it is working properly
Date: 17/02/2022
- Trail 4 : Again sprouting a 2.350Kg Chna for VA kitchen
- With a system load of 14 liters of water in the water tub and 2.350 kg of rinsed hulge in the aluminum vessel.
- The system starts exactly at 7:15pm.
- The system was running very well, and the water pump started after 2 hours of soaking.
- After 2 hours, the system rotates down well without any slippage and the further process is continued.



After 36 hrs




After 36 hours of sprouting, there is no more odor.
Issues while on trial:
- After 2 to 3 cycles, the vessel angle slightly shifted due to the minor change in angle for every rotation.
- I’m thinking of a chain sprocet protention cover.
Suggestion
- I think there is an issue in the code, so change the code and try again.
- Make a cover from pvc pipe.
Date: 21/02/2022
How to make a cover.
I used PVC pipe. This pipe is cut from the center horizontally. After that, use a heat gun. A heat gun is used for heating and changing the pipe’s shape to make a flat shape.


This process is repeated and changes the shape that you require.





Date:- 01/03/2022
Recently, working on code
Problem-solving in code and running and trails.
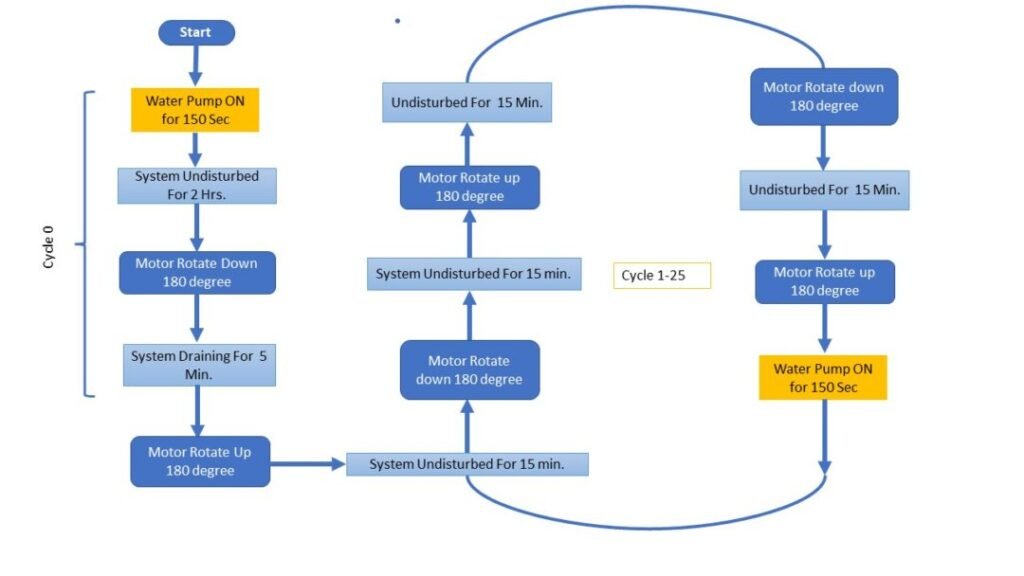
First I discuss this topic with Suvarna and Prathmesh. After discussing we decided to draw a process flow and flow chart.

Edit the hole code
//Grocubator Process Code
//DIC Vigyan Ashram, Pabal
int cycle;
int timer=0;
int water_pump =8;
int motor = 9;
#define IR 7
bool ir_val = 0;
void setup() {
Serial.begin(9600);
pinMode(water_pump, OUTPUT);
pinMode(motor, OUTPUT);
pinMode(IR, INPUT);
for(cycle = 0; cycle < 1; cycle++)
{
Serial.println("Cycle 0 Begin");
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 150 seconds
// ................................................... Step 1
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(50);//1000
Serial.print("Water Pump ON for ");
Serial.print("cycle 1.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
for(timer = 0; timer < 100; timer++) //// 2 hours undisturb //7200
//...................................................... Step 2
{
delay(50);
Serial.print("System Undisturb for ");
Serial.print("cycle 2.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 3.... ");
digitalWrite(motor, LOW);
// delay (30000);
delay (3400);
}
ir_val = 0;
digitalWrite(motor, HIGH);
timer = 0;
/* digitalWrite(motor, HIGH);
Serial.println("Motor OFF...");*/
for(timer = 0; timer < 100; timer++) ///// Draining time of 5 minutes //300
//........................................... Step 4
{
delay(50); //1000
Serial.print("Draining time: ");
Serial.print("cycle 4.... ");
Serial.print(timer);
Serial.println(" Seconds.");
}
timer = 0;
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 5.... ");
digitalWrite(motor, LOW);
//delay (30000);
delay (3400);
}
ir_val = 0;
digitalWrite(motor, HIGH);
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
//........................................... Step 5
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");
}*/
for (cycle = 1; cycle < 25 ; cycle++)
{
Serial.print("Cycle ");
Serial.print(cycle);
Serial.println(" begins");
for(timer = 0;timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 6
{
delay(50); //1000
Serial.print("System Undisturb for ");
Serial.print("cycle 6.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/* for(timer = 0; timer < 5; timer++) //// Water motor dowwn for 5 seconds
//................................................... Step 7
{
digitalWrite(motor, LOW);
delay(1050);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH);
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor up of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 7.... ");
digitalWrite(motor, LOW);
//delay (30000);
//delay (3350);
}
ir_val = 0;
digitalWrite(motor, HIGH);
timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 8
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print("cycle 8.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
//...............................................Step 9
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 9.... ");
digitalWrite(motor, LOW);
delay (30000);
}
// delay (3350);
ir_val = 0;
digitalWrite(motor, HIGH);
timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
//............................................... Step 10
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print("cycle 10.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation down of Vessel for 5.5 seconds
// ........................................... Step 11
{
digitalWrite(motor, LOW);
delay(1050);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 11.... ");
digitalWrite(motor, LOW);
delay(30000);
} //delay (3400);
ir_val = 0;
digitalWrite(motor, HIGH);
timer = 0;
//timer = 0;
for(timer = 0; timer < 100; timer++) ///// Undisturb for 15 min //900
// ............................................... Step 10
{
delay(50);//1000
Serial.print("System Undisturb for ");
Serial.print("cycle 12.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
/*for(timer = 0;timer < 5; timer++) ///// Rotation up of Vessel for 5.5 seconds
// ........................................... Step 11
{
digitalWrite(motor, LOW);
delay(1120);
Serial.print("Motor ON ");
Serial.println(timer);
}
timer = 0;
digitalWrite(motor, HIGH); //// motor STOP:
Serial.println("Motor OFF...");*/
ir_val = digitalRead(IR);
while(ir_val == HIGH) ///// Rotation motor down of Vessel for 5.5 seconds
{
Serial.print("Motor ON ");
Serial.print("cycle 13.... ");
digitalWrite(motor, LOW);
delay (30000);
}
//delay (3350);
ir_val = 0;
digitalWrite(motor, HIGH);
}
timer = 0;
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 50 seconds
//................................................... Step12
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(50);//1000
Serial.print("Water Pump ON for ");
Serial.print("cycle 14.... ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
///// Return to Step 6 and Looping////////
}
}
//}
// the loop function runs over and over again forever
void loop() {
} After uploading the code, we found an error.
- Moter runs properly but does not stop in a proper position.
- I use an IR sensor. IR sensor detects the position but the motor does not stop the proper position.
Working on code again:-

Change the code upload in the system and try multiple times for it to work on or not.
int cycle;
int timer=0;
int water_pump =8;
int motor = 9;
const int IR = 7;
int ir_val = 0;
int count=0;
int count1 = 0;
int count2 = 0;
int count3 = 0;
int count4 = 0;
int count5 = 0;
int count6 = 0;
int count7 = 0;
bool var=0;
bool var1=0;
bool var2=0;
bool var3=0;
bool var4=0;
bool var5=0;
bool var6=0;
bool var7=0;
void setup() {
Serial.begin(9600);
pinMode(water_pump, OUTPUT);
pinMode(motor, OUTPUT);
pinMode(IR, INPUT);
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 150 seconds
// ................................................... Step 1
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(1000);
Serial.print("Water Pump ON for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
for(timer = 0; timer < 7200; timer++) //// 2 hours undisturb//7200
//...................................................... Step 2
{
delay(1000);//100
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer=0;
for(cycle = 0; cycle < 25; cycle++)
{
//180 degree rotation 1
while(var<2)
{
if((count%2==0) && (digitalRead(IR)==1))
{
digitalWrite(motor, LOW);
count = count + 1;
Serial.println("cyle3");
delay(1000);
}
if((count%2==1) && (digitalRead(IR)==1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count = count + 1;
Serial.println("cyle33333");
delay(1000);
break;
}
var++;
}
timer=0;
//system draining for 5 min
for (timer = 0; timer < 300; timer++) ///// Draining time of 5 minutes // 300
//........................................... Step 4
{
Serial.println("cycle 4.....");
delay(1000);//1000
Serial.print("Draining time: ");
Serial.print(timer);
Serial.println(" Seconds.");
}
timer = 0;
//180 degree rotation 2
while(var1<2)
{
if ((count1%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count1 = count1 + 1;
//Serial.println("Motor on");
delay(1000);
}
if ((count1%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count1 = count1 + 1;
delay(1000);
break;
}
var1++;
}
// system Undisturb for 15 min 1
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
//............................................... Step 8
{
Serial.println("cycle 8.....");
delay(1000);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
//180 degree rotation 3
while(var2<2)
{
if ((count2%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count2 = count2 + 1;
//Serial.println("Motor on");
delay(1000);
}
if ((count2%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count2 = count2 + 1;
delay(1000);
break;
}
var2++;
}
// system Undisturb for 15 min 2
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
//............................................... Step 10
{
Serial.println("cycle 10.....");
delay(1000);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
//180 degree rotation 4
while(var3<2)
{
if ((count3%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count3 = count3 + 1;
//Serial.println("Motor on");
delay(1000);
}
if ((count3%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count3 = count3 + 1;
delay(1000);
break;
}
var3++;
}
// system Undisturb for 15 min 3
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
// ............................................... Step 10
{
Serial.println("cycle 12.....");
delay(1000);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
//180 degree rotation 5
while(var4<2)
{
if ((count4%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count4 = count4 + 1;
//Serial.println("Motor on");
delay(1000);
}
if ((count4%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count4 = count4 + 1;
delay(1000);
break;
}
var4++;
}
// system Undisturb for 15 min 4
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
// ............................................... Step 10
{
Serial.println("cycle 12.....");
delay(1000);//1000
Serial.print("System Undisturb for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
//180 degree rotation 6
while(var5<2)
{
if ((count5%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count5 = count5 + 1;
//Serial.println("Motor on");
delay(1000);
}
if ((count5%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println("Motor off");
count5 = count5 + 1;
delay(1000);
break;
}
var5++;
}
for (timer = 0; timer < 150; timer++) //// Water Pump ON for 50 seconds
//................................................... Step12
{
Serial.println("cycle 14.....");
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(1000);//1000
Serial.print("Water Pump ON for ");
Serial.print(timer);
Serial.println(" seconds.");
}
timer = 0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println("PUMP OFF...");
}
}
void loop() {
}
Date: 15/03/2022
- Trail 5 : Again sprouting a 1.350Kg Black Eyed Beans (Chavali)for VA kitchen
- system load with 14 liters of water in the water tub and 1.350 kg of rinsed Black Eyed Beans (Chavali) in the aluminum vessel.
- The system starts exactly at 5:40 pm.
- The system was run very well, and the water pump started after 2 hours of soaking.
- After 2 hours, the system rotates down well without slippage & the further process is continued.



Result: very good sprouting. There is no smell and no stickiness.
Date: 18/03/2022
- Trail 5 : Again sprouting a 1Kg Chickpeas ( kabuli chna) for VA kitchen
- system load with 14 liters of water in the water tub and 1 kg of rinsed Chickpeas ( kabuli chna) in the aluminum vessel.
- The system starts exactly at 5:40 pm.
- The system was run very well, and the water pump started after 2 hours of soaking.
- After 2 hours, the system rotates down well without slippage & the further process is continued.


Result: good sprouting. There is no smell and no stickiness.
Date: 26/03/2022
The system was delivered in a keychain at Vigyan Ashram.


On March 28, 2022, the kitchen crew took the first trail, sprouting a 2.350 kg Chna for the VA kitchen on the system.






{kind=link}