
1 September 2022 to 14 September 2022
Laser Machine

Name : SIL Laser Engraving – Cutting Machine
Application: SIL Laser Engraving – Cutting Machine is versatile & finds application in signage, indoor & outdoor advertisement, art & craft, gift, shoes, toys, garments, model cutting, papers & packaging, wood & MDF cutting industry, interior, decorators and many more.
Specification
| Modal no | 1325-1318 |
| Engraving speed | 0-640000mm/min |
| Cutting speed. | 0-30000mm/min |
| Laser type | Co2 DC glass laser tube |
| Laser power | 80 Watt |
| Positioning Accuracy | 80 Watt |
| Processing area | 900 by 600mm |
| Working speed | Adjustable |
| Power supply | AC 220V+ 5%; 50/60Hz |
| Format supported | AI, BMP, PLT, .DXF, DST etc |
FEATURES
- Top cutting precision and positional accuracy
- Improved edge quality and surface finish
- Strong repeatability
- The use of materials not cut by traditional devices
- Drilling and engraving in addition to cutting
- Negligible workpiece degradation
- Cost-effectiveness
- Minimal thermal stress zone
- Cuts of complex shapes
Process to start laser machine

Assignments – 1
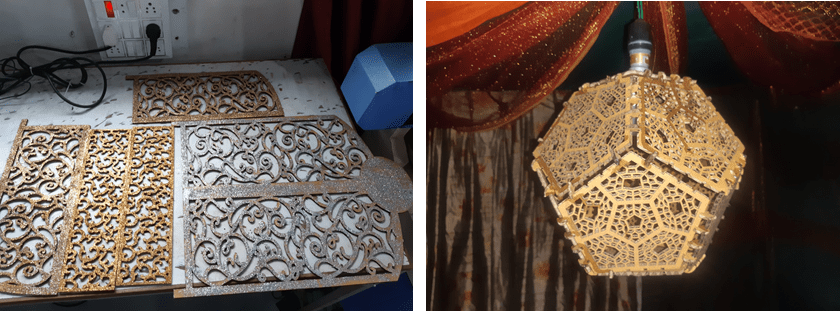
Lamp DESIGN IN ‘CorelDraw’ USING PLYWOOD
Lamp DESIGN IN ‘CorelDraw’ USING PLYWOOD
Designed the lamp and put the Barefoot college international logo on that lamp
And make more designs for Ganesh ji’s festival
For the parametric design consider the following steps
Step 1. create new CorelDraw page for lamp design
Open corelDraw, create new document.
Step 2:- Go to shape tool bar select rectangle and draw in drawing window.
Enter the value of rectangle
Step3:- Create another rectangle by copying it inside the rectangle.

Step4:- Draw a small rectangle on the rectangle center top side for cut in border
Step5:- Go to paralleg dimension, select dimension and exclude from both sides

Step5:- Copy the rectangle and set the same value to the distance.
Note – The same processes set all smaller rectangles around the object and make a copy of the object.

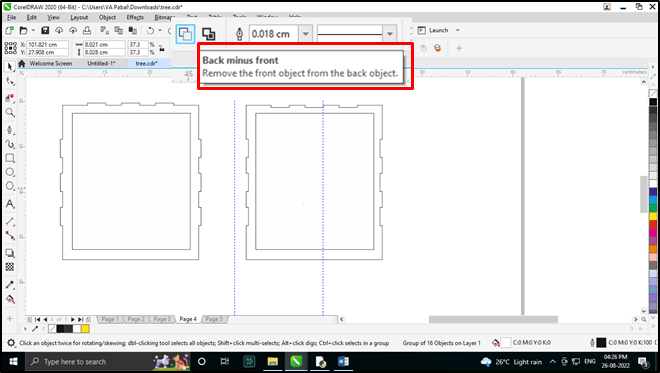
Step6:- Select all the borders and go to the weld tool and click to make a cut on the top side of the border.
Note- Cut the two parts of the lamp on the top side and cut the two parts on the inside side.

Step7:- Click on back minus front tool for cut inside.
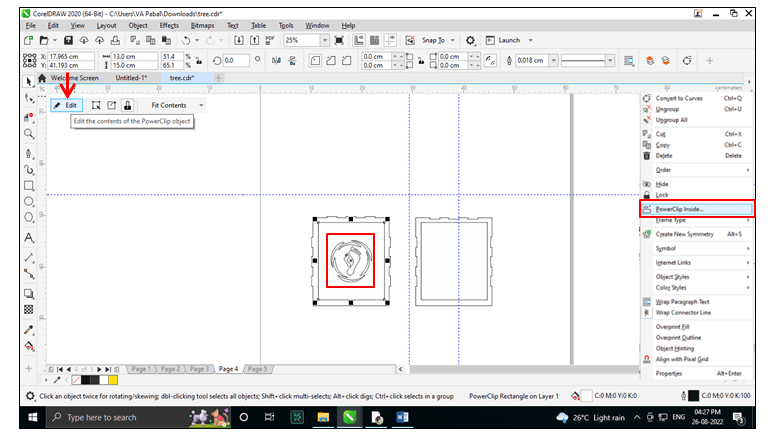
Step8:- To set the photo inside the shape, right click on the photo and click on PowerClip Inside Tool
Go to the edit tool and set location of design.
Make all the parts of the lamp in the same way
and save the design
Go to the file menu.
Click on export, save the file as DXF 2D(.dxf)
Note that when you are saving ,system should be connected to internet.

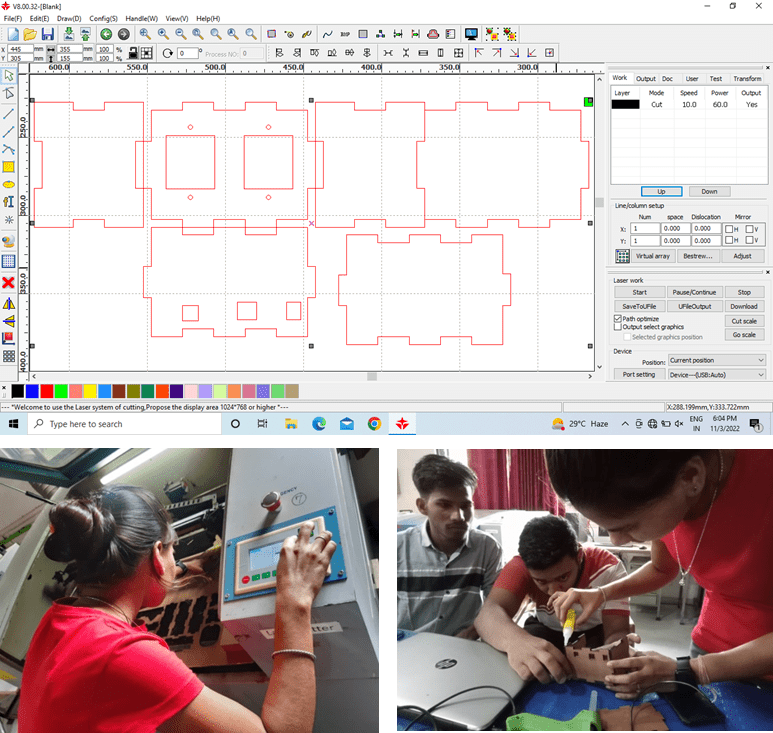
Use RD works Software
Step 1:- Download and open the RD work software
Go to the file menu and select import.

Step 2:- Select the DXF file you want to open in RD works.
Once the file is opened replicate it in no.

Step 3:- Select design you have to cut ,give it proper color default color is black .
Double click on cut mode present at right side of the screen with color layer.
Set the image
Note that the speed and power for card board (6.9mm)is set as 35mm/s and100% respect.
And plywood sheet :- Speed20 and Power 60%

Step 4:- Make sure that USB port is properly connected with laser cutter other wise it will provide communication error.
Click on download and file will be downloaded in machine.

Hands on Laser cutter
This is the monitoring panel of SIL laser cutter.through that we can change different parameters of machine before cutting the materials.

Step 5:- Placed the material on the bed.
Set the origin
Adjust Z axis i.e position of laser head from the material surface.
Select the file in panel. Identify the cutting area with frame.
Click on start/ pause button.

Create final design


Create some Design

Assignments – 2
Laser Cut Cart-Pushing Robot

- 3mm plywood*
- TT 6V Geared Motor
- 2 AA Battery Holder with Switch and Wire Leads
- 2 AA Batteries

For the Laser Cut Cart-Pushing Robot design consider the following steps
Download the SVJ file.
I have downloaded this file from internet we can make design using Vector Illustration Software or CorelDraw.
Step1:- Use RD works Software
Download and open the RD work software.
Go to the file menu and select import and emport.

Step2:-Select the Dxf file you want to open in RD works.

Step3:-Set the Speed & power
Select design you have to cut ,give it proper color default color is black .
Doulble click on cut mode present at right side of the screen with color layer.
Note- that the speed and power for plywood (3 mm)is set as 20mm/s and60% respect.as per group assignment.

Step4:- Make sure that USB port is properly connected with laser cutter other wise it will provide communication error.
Click on download and file will be downloaded in machine.

Step 5:-Hands on Laser cutter
This is the monitoring panel of SIL laser cutter. Through that we can change different parameters of machine before cutting the materials.

Step 6:- Placed the material on the bed.
Set the origin
Adjust Z axis i.e position of laser head from the material surface.
Select the file in panel. identify the cutting area with frame.
Click on start/ pause button.
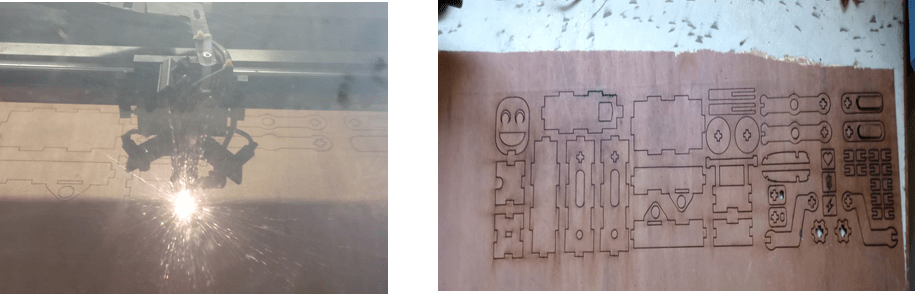
Step7:- Assembling all parts of the robot

Final Design

Working Video
PERSISTENCE OF VISION LED DISPLAY (Assignment- 3)

Objective
To develop a project by using FabLab machine and Arduino.
I was given a ‘persistence of vision’ project.
Including the use of Arduino, laser cutter, Modela machine and designing software.
Persistence of vision refers to the optical illusion whereby many different images are combined into one image in the human mind and is thought to be the explanation for motion perception in cinema and animated films
Materials
- 5 LED
- Arduino UNO
- 5 resistors
- Perfboard
- 9v Battery
- Switch
- Ac pen

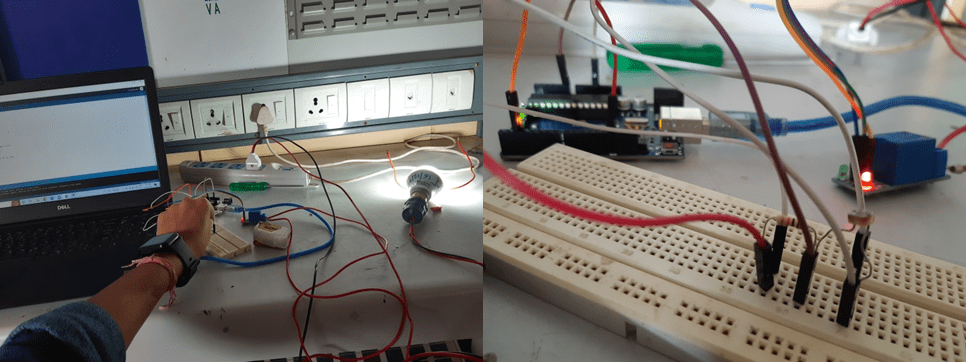
- In this project first i did connections of arduino and components on bread board.I checked whether program is running or not.

- Connect and solder all components with a perfboard. The resistors should be connected to the positive pins of the respective LEDs and the negative pins should be connected together. Then connect the LED to the Arduino. First connect the LED to arduino pin2. Connect the second LED to arduino pin3. Connect the negative wire from the led to the GND pin of the arduino. For the connection of LED with arduino one can mention arduino code. Connect all the LEDs accordingly. Now, connect a 9V battery to the regulator.

- Program using Arduino Uno board
(You can also program using Arduino Pro Mini or another arduino board)

- Assembling the Rotary Mechanism for the Arduino POV Display
After that i designed some parts in inscape to cut in laser cutter which was used to mount pcb,arduino board and battery on motor or fan.I made two parts one was long strip with half circle and another part is circle.
I used 12V ac fan to give effect of persistence of vision .First i mounted pcb,arduino board and battery on laser cutted acrylic sheet.

- Assembling the Rotary Mechanism for the Arduino POV Display

- Finally POV Display is ready

Reference- https://maker.pro/arduino/projects/arduino-pov-display
3 D Printer
In this week we have used 3D printer.we test different 3d design parameters. We have used fracktory s/w for G-code generation, which can convert our 3D design file in the programming language, which will be understood by the machine.
About G-code:-
G-codes, also called preparatory codes, are any word in a CNC program that begins with the letter G. Generally it is a code telling the machine tool what type of action to perform, such as: Rapid movement (transport the tool as quickly as possible in between cuts) Controlled feed in a straight line or arc.(Ref:Wikipedia)
Simply converting the 3D Object into programming language
In fab lab 3D printer support the Facktory Software

3 D Printing
3D printing or additive manufacturing is a process of making three dimensional solid objects from a digital file. The creation of a 3D printed object is achieved using additive processes. In an additive process an object is created by laying down successive layers of material until the object is created. Each of these layers can be seen as a thinly sliced horizontal cross-section of the eventual object. 3D printing is the opposite of subtractive manufacturing which is cutting out / hollowing out a piece of metal or plastic with for instance a milling machine. 3D printing enables you to produce complex shapes using less material than traditional manufacturing methods. (Source: https://3dprinting.com/what-is-3d-printing/)
The work flow for the design is given below.
- About Fracktal works
- Additive and subtractive method
- 3D print design using Rhino.6
- Use of Fracktory S/W
- Object Printing
About Fracktal works

Specifications
- Bed Size:-250 mm x 250 mm x 300 mm
- Print Technology:- Fused Deposition Modelling (FDM)
- Filament Diameter: -1.75mm
- Nozzle Diameter:- 0.4mm
- Nozzle Temperatures:-Upto 240 °C
- Bed Temperature:- Upto 110 °C
- Compatible Materials:-ABS, PLA, Tough PLA, PLA+, PETg, PVA, PVA+,BVOH,Polycarbonate, Nylon 12*, Carbon Fiber Nylon*, Carbon Fiber PLA
- Supported File Types:- STL, OBJ
- File Transfer :-USB Pen Drive, WIFI, LAN
Additive and subtractive method
Additive method
Additive method is actually a synonym for 3D printing and/or any process by which 3D objects are constructed by successively depositing material in layers such that it becomes a predesigned shape.
Subtractive method
Subtractive method is a process by which 3D objects are constructed by successively cutting material away from a solid block of material. Subtractive process can be done by manually cutting the material but is most typically done with a CNC Machine.
Assignments – 4
3D Print using AUTODESK 123D Design

After creating the design, go to Export As 3D and save the STL file.

Use of Fracktory S/W
Fracktory S/W its open source s/w. It convert STL file in to G-code. For 3d printing machine required only G-code.




Object Printing by 3D Printer






Finally 3D printed object is ready

Repair DC/AC fans.
Assignments – 5
2 October to 5 October
Objective:
Repair DC/AC fans.
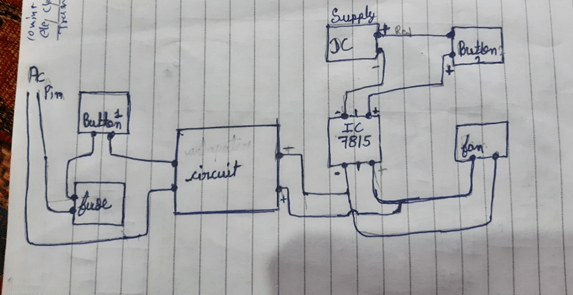
The AC and DC fan that was installed in Yogesh Kulkarni sir’s office. That fan runs on both AC & DC current. but it just didn’t work
I repaired it.
Problem: – In AC to DC converter circuit, 2 resistors, 2 capacitors and fuse were burnt, I replaced them and started the fan on one supply but the fan turned off after running for some time.
After this I checked all the components of the circuit with multimeter, some of them diode, capacitor and bridge rectifier were not working.
(This bridge rectifier converts AC current to DC current, which is made up of 4 diodes.)

The IC (7815 voltage regulator) installed in the second circuit was also not working.
About 7815 voltage regulator IC
LM7815 is a fixed-voltage integrated-circuit voltage regulator designed for a wide range of applications.
LM7815 Pinout Configuration
| Pin Number | Pin Name | Description |
| 1 | Input (V+) | Unregulated Input Voltage |
| 2 | Ground | Connected to Ground |
| 3 | Output (Vo) | Outputs Regulated +5V |

7815 Regulator Features
- 15V Positive Voltage Regulator
- Minimum Input Voltage is 17V
- Maximum Input Voltage is 35V
- Output Current: 1.5 A
- Internal Thermal Overload and Short circuit current limiting protection is available.
- Junction Temperature maximum of 125 degree Celsius
- Available in TO-220, TO-3 and KTE package (Refrains:-https://components101.com/ics/7815-voltage-regulator-pinout-datasheet)
Made a circuit by installing IC 7815 for only 12 volts coming from DC supply.

Repaired both circuits and install new circuits


Result:- the Fan is operating properly.
Repair MICRO SOLAR DOME USING REGULATOR IC
Date – 6/10/22 to 10/10/22
Assignments – 6

Introduction:- Multimeter is a device used to measure all electricity parameters.In this task we check the voltage generating from solar modules.and how to operate solar dome bulb using modules voltage.
Objectives:–
To operate micro solar dome using regulator IC using open circuit voltage of solar module.
We took solar modules and put in the sunlight.The solar modules was charged due to exposure to sun.then we measured the voltage of solar module with multimeter.i.e 10.8 v (3w 10v parallel connected two modules)

I have connected the solar dome bulb to a variable power supply. I check the required voltage i.e. approx 6v to 7V for solar dome bulb.
The voltage coming from the solar module is 10.8v and the dome bulb requires 6v to 7V. We learn the Voltage Regulator information from the website.
7809 Voltage Regulator
LM7809 is a fixed-voltage integrated-circuit voltage regulator designed for a wide range of applications. The L7809 voltage regulator provides 9V Positive voltage as output and can provide local on-card regulation, eliminating the distribution problems associated with single-point regulation. Although designed primarily as a fixed voltage regulator, but it can be used with external components to obtain adjustable voltage.
LM7809 Pinout Configuration
| Pin Number | Pin Name | Description |
| 1 | Input (V+) | Unregulated Input Voltage |
| 2 | Ground | Connected to Ground |
| 3 | Output (Vo) | Outputs Regulated +9V |
L7809 Regulator Features
- 9V Positive Voltage Regulator
- Minimum Input Voltage is 11V
- Maximum Input Voltage is 35V
- Output Current: 1.5 A
- PSRR / Ripple Rejection: 55 dB
- Output Type: Fixed
- Internal Thermal Overload and Short circuit current limiting protection is available.
- Junction Temperature maximum of 125 degree Celsius
- Available in TO-220, TO-3 and KTE package (Reference- https://components101.com/regulators/7809-voltage-regulator-pinout-datasheet-specifications)
Soldering to ic and dome bulb and solar module connections.

I learn the process of attaching the voltage regulator in the circuit.after that we connect the 7809 voltage regulator in our circuit, the bulb operating properly.

After connecting the voltage regulator I put the solar module back in the sunlight. Then we measured the voltage of the solar module with a multimeter. And we saw that 10.8v was coming from the solar panel which we have also checked earlier. Output voltage from voltage regulator IC. 6.8 was coming which is enough for micro solar dome bulb. the bulb operating properly.
For day group workshop in fablab
Date 11/10/2022 to 14/10/12
In this workshop, basic information was given about all the tools and courses of Fablab.
In this workshop we were taught about 3d printer, laser cutter, P.C.B milling machine and later group assignment was given.
Suhas sir taught us PCB and Eagle software. And together we made a PCB.
Taught PCB Designing
In a group assignment we have to design an LED circuit using the circuit design software “EAGLE” (Easily Implemented Graphical Layout Editor). Eagle is easily accessible and user friendly software. Eagle has flexible and expandable EDA (Electronic Design Automation) schematic capture, PCB layout, autorouter and CAM programming facilities.
In this assignments going through following steps
In a group assignment we have to design an LED circuit using the circuit design software “EAGLE” (Easily Implemented Graphical Layout Editor). Eagle is easily accessible and user friendly software. Eagle has flexible and expandable EDA (Electronic Design Automation) schematic capture, PCB layout, autorouter and CAM programming facilities.
In this assignments going through following steps

- About ATtiny 45
- About Eagle Software.
- Design PCB using Eagle Software.
- Milling PCB by SRM 20
- Soldering PCB
About Attiny45
ATtiny45 is a high-performance, low-power Atmel 8-bit AVR RISC-based microcontroller combines 4KB ISP flash memory, 256-Byte EEPROM, 256B SRAM, 6 general purpose I/O lines, 32 general purpose working registers, one 8-bit timer/counter with compare modes, one 8-bit high speed timer/counter, USI, internal and external Interrupts, 4-channel 10-bit Analog to Digital converter, programmable watchdog timer with internal oscillator, three software selectable power saving modes, and debug WIRE for on-chip debugging. The device achieves a throughput of 20 MIPS at 20 MHz and operates between 2.7-5.5 volts.By executing powerful instructions in a single clock cycle, the device achieves throughputs approaching 1 MIPS per MHz, balancing power consumption and processing speed.(information taken from the internet)
Features of ATtiny-45 Micro-controller:
- Flash (Kbytes):4 Kbytes
- Pin Count:8
- Max. Operating Freq. (MHz):20 MHz
- CPU:8-bit AVR
- Number of Touch Channels:3
- Max I/O Pins:6
- Ext Interrupts:6
- USB Interface:No
Pin out Attiny45

About Eagle Software
EAGLE is a scriptable electronic design automation (EDA) application with schematic capture, printed circuit board (PCB) layout, auto-router and computer-aided manufacturing (CAM) features. EAGLE stands for Easily Applicable Graphical Layout Editor (German: Einfach Anzuwendender Grafischer Layout-Editor) and is developed by CadSoft Computer GmbH. The company was acquired by Autodesk Inc. in 2016(wikipedia)
More about Eagle
Designing PCB through Eagle Software
Step1.Down loading Eagle software in the operating system

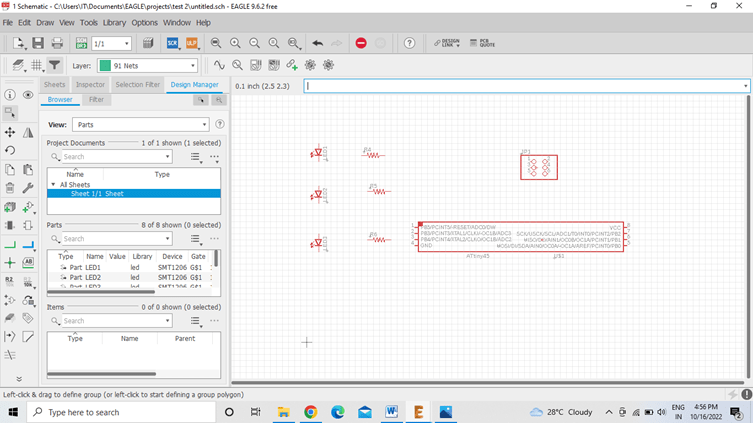
Step2.Open the Eagle goto file select project new Schematics.

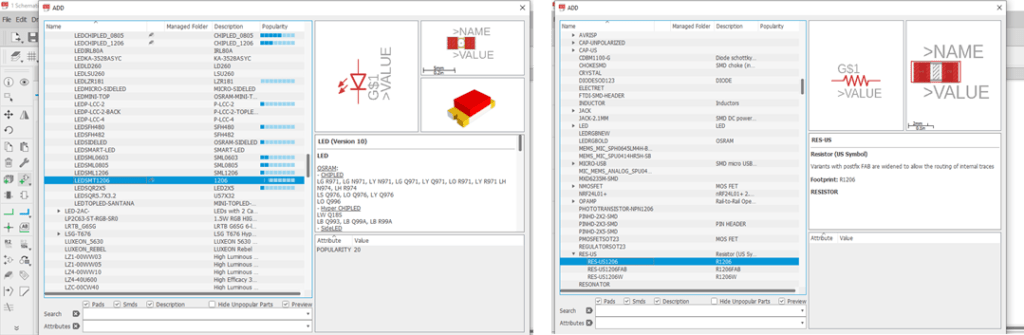
Step3:- Adding components in new schematics.
Go to add components. Click on fab library and select component have to add in schematics

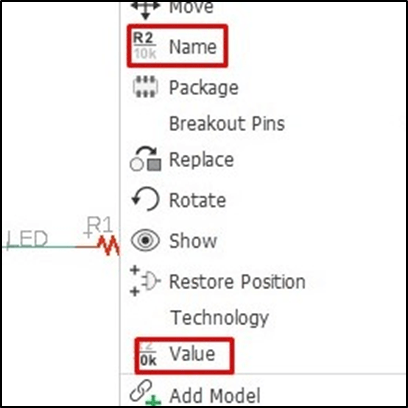
Step4. Name and apply the value to the components.
Right click on the plus sign on the compoent and apply its name and value
Step5. All the components add in the schematics as shown in the image.With ATtiny 45 added one resistor,LED and single pin connector .
Step6.check the errors in schematics before switch board.
Goto the Tools click on ERC(Electrical Rule check).which shows the details of Errors and warnings.
Check all the warning and fixed it.

Step7.Now Generate /switch to board.
Goto the top of interface click on SCH/BRD(switch to board ).opening a Eagle second window.
This will begin the process of generating a PCB layout based on the components and wiring in your schematic.

Step8.Check DRC in board
Before generating the PCB board design go through the DRC.
DRC means Design rule check is the option provided in the eagle to ckeck the trace width in our board design.
This will help us to design the board by considering all manufacturing limitations.

Step9.Placing components in PCB layout area
Placing all the components on the layout such that the minimum wires cross each other.We can route the PCB by Auto router or by Route airwire (Hand Routing).i have tried for both.
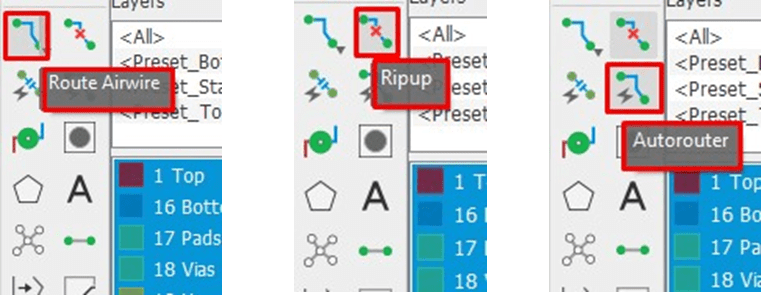
For auto routing arrange all the components on the layout.
Click the Auto router.
in Auto router main setup click on continue.
in Routing Variants dialogs click on start, optimize completed. Note that the vias becomes zero and select top router (best auto routed path for given ckt)

- For hand routing arrange all the components on the layout.
- Click on rout airwire.
- Arrange all the route one by one such that no two connecting wires cross each other.
Remove all the unwanted layers and prepared the PCB image for export.

Goto file menu click on export select image.

Set the name ,location and resolution of the image.Also tick on monochrome for converting the board image into the trace.
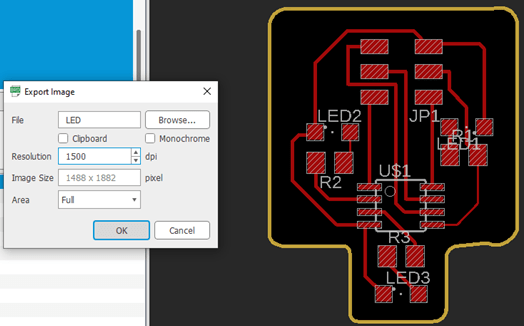
Traces images.

PCB milling by SRM 20
Open the Fab module
Select the .png image.I have selected the handrouted LEC board.select the mill traces(1/64’’).select calculate

Set the origin. Click on open socket. Click on send file. Milling started.

After completing the milling the PCB mount all the components on the PCB.follow all the soldering rules as mention in the Electronic production.

Programming the PCB.
click on list of unofficial board support urls.search Attiny 45.add url in the manager window click ok.
Install Attiny45
Go to tool – Processor – right check ATtiny 45.
Go to tool – Programmer – select USBtinyISP.
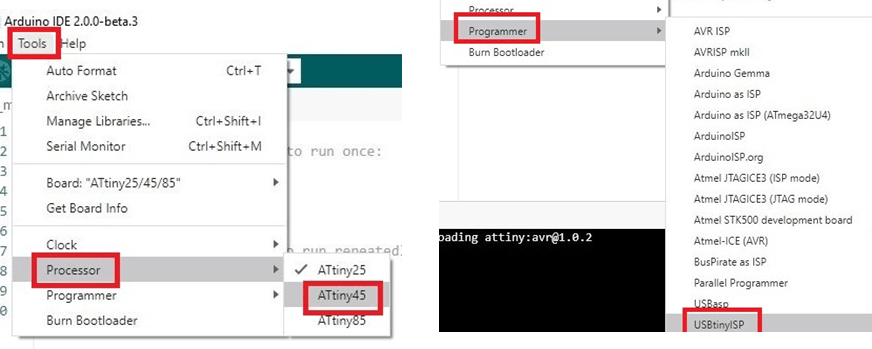
Edit the blink program according to pins. Upload in to ATtiny45.Run the program.
Blinking code of LED.

Code:-
void setup() {
// initialize digital pin LED_BUILTIN as an output.
pinMode(8, OUTPUT);
pinMode(8, OUTPUT);
pinMode(8, OUTPUT);
}
// the loop function runs over and over again forever
void loop() {
digitalWrite(8, HIGH);
delay(1000);
digitalWrite(8, LOW);
delay(1000);
digitalWrite(9, HIGH);
delay(1000);
digitalWrite(9, LOW);
delay(1000);
digitalWrite(10, HIGH);
delay(1000);
LED Glow in PCB

Group Assignments
UV Water Filter Automation
During the four days workshop, we were given a group assignment of UV Water Filter Automation.
In which we had to switch on the motor and UV tube for 15 minutes and switch it off for 45 minutes.
Objectives:- Turning the motor on and off automatically
Turning the UV Tube on and off automatically
About UV Tube
UVC light is part of the electromagnetic spectrum that spans 100-400nm. It is divided into 3 types UVA, UVB and UVC. UVC which is an invisible light spanning the range of 100-280nm and has powerful germicidal properties so UVC light use as disinfectant for water, surface, air etc. Ultra Violet disinfection usually involves a UV lamp. The UV lamp is used to provide pure and safe drinking water. The UV light used in this process is a high powered UV termed as UV-C or germicidal UV.
UVC rays have the shortest wavelength, and therefore highest energy, they are capable of killing bacteria and viruses, also called pathogens. Water is disinfected as it runs through a stainless steel chamber containing a UV lamp. As water flows past the lamp, illness-causing microorganisms receive a lethal dose of UV light that attacks their DNA and eliminates their ability to reproduce. Harmful bacteria and viruses are deactivated, and your family is safe.
Under no circumstances should you stare at a UV-C light source for any amount of time. When UV-C light shines on water or if the bulb is immersed in the water, some of the light penetrates the water and is absorbed by germs, such as bacteria and viruses, in the water. The average bacterium will be killed in ten seconds at a distance of six inches from the lamp in an American Ultraviolet Germicidal Fixture.
UV light can have efficient inactivation of bacteria up to a distance of eight feet on either side and exposure time of 30 minutes is adequate. The medical profession was the first to endorse the germicidal effect of UV lamps and it has been used traditionally to disinfect operation theaters.
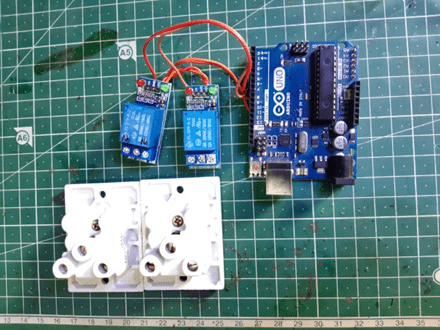
Component :- 1.
5v relay – 2
2. Electric socket-2
3. Ardiuno Board -1
Design
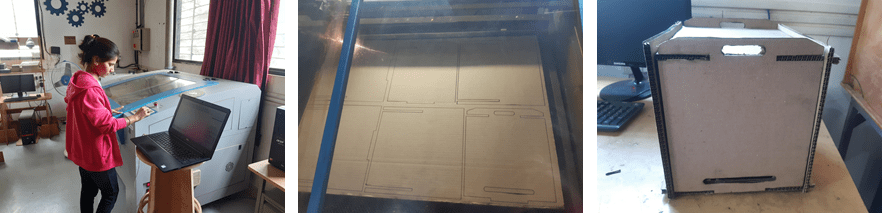
Designed a box with fusion software to setup all the components together
Cut out the box with a lager cutter
Soldering Ardiuno or relay together. Connected the relay with the socket and set it in the box.

Programing Code
int uv=6
int motor=8
void setup() {
pinMode (uv,OUTPUT);
pinMode (motor,OUTPUT);
}
void loop() {
digitalWrite (uv,HIGH)
digitalWrite(motor,LOW)
delay (2700000)
digitalWrite (uv,HIGH)
digitalWrite(motor,LOW)
delay (900000)
}
disassembled the model.
Result uv water filter automatic working

Arduino with LDR Using LED lamp and Relay
Assignments – 7
Date-2/11/22
Components Required for the Arduino with LDR Project
Arduino Uno – 1
LDR – 1
LED and Resistor Kit – 1
5V Relay Module – 1
USB cable type – 1

LDR sensor
LDRs are light-dependent instruments, whose resistance decreases when light falls on them and increases in darkness. When a light dependent resistor is kept dark, it has very high resistance. It can be as high as 4.5 Ω. If the device can absorb light, its resistance is dramatically reduced. The current increases when a constant voltage is applied and the light intensity increased. The following figure shows the resistance vs. illumination curve for a particular LDR.
Circuit diagram

LDR is connected to analog pin A0. With the 10K resistor in series the other end of the resistor will go to GND.
Connected the relay input pin to digital pin 2 of the arduino. Connected relay GND to arduino’s GND and relay VCC to arduino’s VCC
A bulb connects with a 5V relay module’s NO pin and NC pin.
We will do programming to turn off the LDR lamp during the day and turn it on at night. And enter the value of the LDR.
programing Code
int LDRInput=A0;
int Relay=2;
void setup() {
Serial.begin(9600);
pinMode(LDRInput,INPUT);
pinMode(Relay,OUTPUT);
}
void loop() {
int value=analogRead(LDRInput);
Serial.println(“LDRInput,value is:”);
Serial.println(value);
if(value<300)
{
digitalWrite(Relay ,LOW);//The LED turns ON in Dark.
delay(100);
}
else
{
digitalWrite(Relay,HIGH);//The LED turns OFF in Light.
delay(100);
}
}
We see the value of DR on the serial monitor.

After uploading the program the bulb is operating properly.

Working vedio
ATAL Karnataka Work shop (4 day workshop)
8/11/22
Activity -1
Lager cutter
Make Key Chains for Trainees Using Lager Cuter.

Activity – 2
Torch

Suhas sir gave basic information about electronics and taught how to make a small torch and soldering.

Component
9 volt Battery
Resister – 1 k
LED- 2
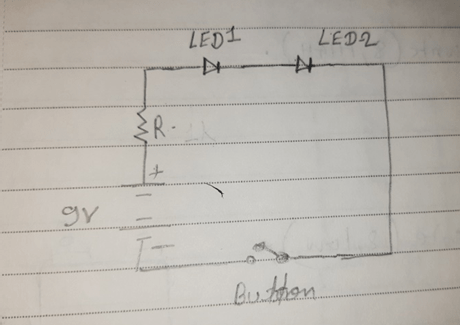
Connected and soldered according to diagram

Date – 9/11/22
Activity – 3
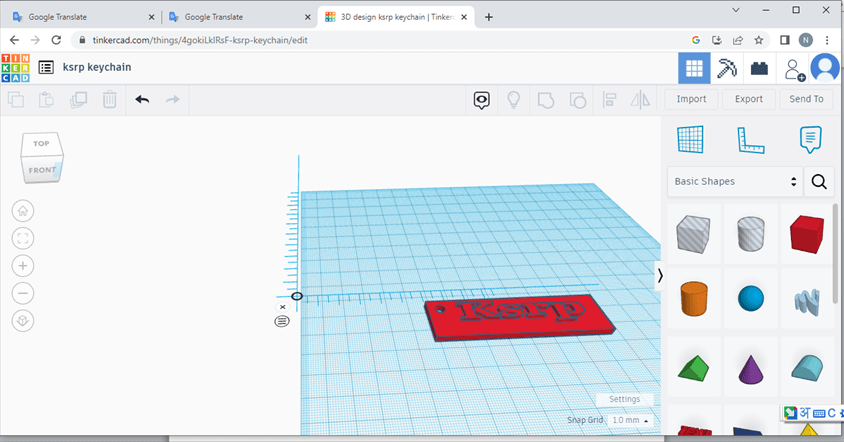
Tinker cad
Tinkercad is a free-of-charge, online 3D modeling program that runs in a web browser. Since it became available in 2011 it has become a popular platform for creating models for 3D printing as well as an entry-level introduction to constructive solid geometry in schools (Wikipedia)
Inderjit and Vipul sir gave information about Tinker cad software. And taught how to make 3D models on Tinker cad software.
we made a keychain with tinker cad
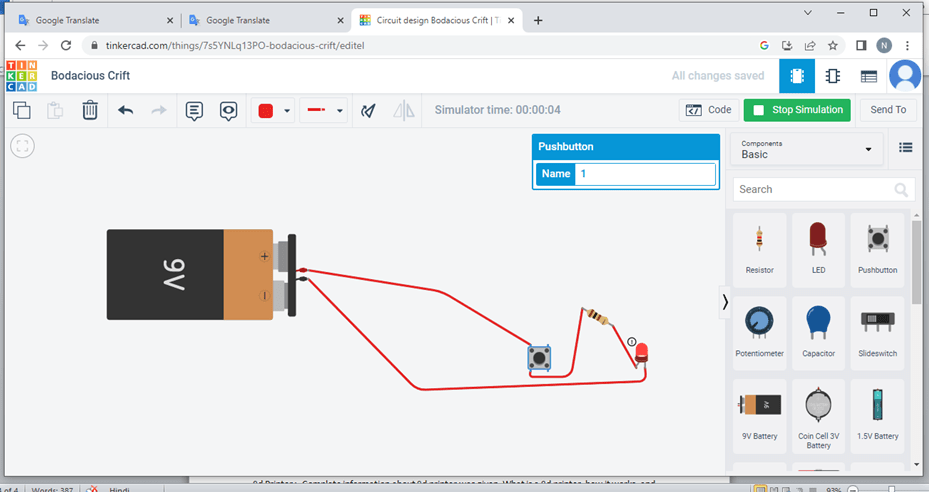
Making Electronic Circuits in Tinker Cad :- Kishore Sir taught how to make circuits in Tinker Cad.
In Tkinter Cad we can create a circuit and check whether the circuit is working or not and can also make changes in it.
3D Printer :- Sumit sir gave complete information about 3D printer. What is a 3D printer, how it works and what can be made with a 3D printer, by giving all kinds of information, taught how to operate a 3D printer and got all the trainees to print an object.

Shuhas sir and Kishore sir gave basic information about Arduino, programming and sensor.
During this I learned how to use rain sensor, temperature sensor, light sensor, smoke sensor, soil sensor, IR sensor, ultrasonic sensor ETC.
Temperature sensor
The temperature sensor measures the temperature. It is a device that measures temperature by means of an electrical signal. To measure the temperature, a thermocouple or RTD (resistance temperature detector) is required. These devices detect the temperature of a surface, environment, or human body. Temperature sensors also tell how cold or hot a surface is.
Ultrasonic sensor
An ultrasonic sensor is an electronic device that measures the distance to a target object by emitting ultrasonic sound waves and converting the reflected sound into an electrical signal. Ultrasonic waves travel faster than the speed of audible sound (that is, sound that humans can hear).
Ultrasonic sensors are mainly used as proximity sensors. They can be found in automobile self-parking technology and anti-collision safety systems. Ultrasonic sensors are used in robotic obstacle detection systems as well as in manufacturing technology.
Light Dependent Resistor
As the variation of light i.e. illumination happens on the LDR, in the same way the LDR varies its resistance. When there is no illumination on LDR, it offers very high resistance (MegaOhm). As light is put on the LDR, its resistance starts decreasing gradually. The most important thing for a sensor is the change of any electrical quantity. We can configure the change of resistance accordingly and use it in different applications.
Infrared (IR) sensor
An infrared (IR) sensor is an electronic device that measures and detects infrared radiation in its surrounding environment. There are two types of infrared sensors: active and passive. Active infrared sensors emit and detect infrared radiation. Active IR sensors have two parts: a light-emitting diode (LED) and a receiver. When an object approaches the sensor, the infrared light from the LED is reflected away from the object and is detected by the receiver. Active IR sensors act as proximity sensors, and they are commonly used in obstacle detection systems (such as in robots).
Activity was done with Arduino and sensor. In which we connected smoke sensor sensor, ultrasonic sensor and soil sensor to arduino and understood the working method.

In this workshop I learned about arduino, basic electronics, and sensors.
Create 3D & Design
Assignments -8
Prashant sir gave me the assignment to extract some files from laser cutter and 3d printer.
2D printer

Grocubator
Assignments -9
Date – 9/01/2023 to 14/01/2023
Suhash sir gave me an assignment. In which I was given to work on the Grocubator project. I checked Grocubator. Checked whether Grocubator is working as per Process flowchart or not.
For full details of this project visit this link(https://vadic.vigyanashram.blog/2022/02/11/__trashed-2/)
It is basically a smart, medium-sized incubator for sprouting legumes and seeds. It can soak seeds as well and recycle the same water throughout the entire process. The Grocubator will work on the same traditional steps, so its products will be completely organic. The intention of this is just to reduce repetitive tasks and the effort required for producing buck quantity.
Problem
Water pump was not working.
Relay connection is not correct.
Water leakage through the vessel lid
As in trial, we identified the issue with an exact 180-degree rotation of the vessel. In the system, we calculated the time delay for 180-degree rotation, but due to a slight change in the degree of the 1st cycle, it led to a large change in further repetitive cycles.
Solution
After checking the Grocubator, I brought a water pump from the market. And changed the water pump.
Soldering loose connections properly.


Repaired the box of components.
The box top part of the component was lost. Making a new part with a laser cutter by taking the measurement of the box.

Programing Code :-
int cycle;
int timer=0;
int water_pump =8;
int motor = 9;
const int IR = 7;
int ir_val = 0;
int count=0;
int count1 = 0;
int count2 = 0;
int count3 = 0;
int count4 = 0;
int count5 = 0;
int count6 = 0;
int count7 = 0;
bool var=0;
bool var1=0;
bool var2=0;
bool var3=0;
bool var4=0;
bool var5=0;
bool var6=0;
bool var7=0;
void setup() {
Serial.begin(9600);
pinMode(water_pump, OUTPUT);
pinMode(motor, OUTPUT);
pinMode(IR, INPUT);
for(timer = 0; timer < 150; timer++) //// Water Pump ON for 150 seconds
// …………………………………………… Step 1
{
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(1000);
Serial.print(“Water Pump ON for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer=0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println(“PUMP OFF…”);
for(timer = 0; timer < 7200; timer++) //// 2 hours undisturb//7200
//……………………………………………… Step 2
{
delay(1000);//100
Serial.print(“System Undisturb for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer=0;
for(cycle = 0; cycle < 25; cycle++)
{
//180 degree rotation 1
while(var<2)
{
if((count%2==0) && (digitalRead(IR)==1))
{
digitalWrite(motor, LOW);
count = count + 1;
Serial.println(“cyle3”);
delay(1000);
}
if((count%2==1) && (digitalRead(IR)==1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count = count + 1;
Serial.println(“cyle33333”);
delay(1000);
break;
}
var++;
}
timer=0;
//system draining for 5 min
for (timer = 0; timer < 300; timer++) ///// Draining time of 5 minutes // 300
//……………………………………. Step 4
{
Serial.println(“cycle 4…..”);
delay(1000);//1000
Serial.print(“Draining time: “);
Serial.print(timer);
Serial.println(” Seconds.”);
}
timer = 0;
//180 degree rotation 2
while(var1<2)
{
if ((count1%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count1 = count1 + 1;
//Serial.println(“Motor on”);
delay(1000);
}
if ((count1%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count1 = count1 + 1;
delay(1000);
break;
}
var1++;
}
// system Undisturb for 15 min 1
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
//……………………………………….. Step 8
{
Serial.println(“cycle 8…..”);
delay(1000);//1000
Serial.print(“System Undisturb for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer = 0;
//180 degree rotation 3
while(var2<2)
{
if ((count2%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count2 = count2 + 1;
//Serial.println(“Motor on”);
delay(1000);
}
if ((count2%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count2 = count2 + 1;
delay(1000);
break;
}
var2++;
}
// system Undisturb for 15 min 2
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
//……………………………………….. Step 10
{
Serial.println(“cycle 10…..”);
delay(1000);//1000
Serial.print(“System Undisturb for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer = 0;
//180 degree rotation 4
while(var3<2)
{
if ((count3%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count3 = count3 + 1;
//Serial.println(“Motor on”);
delay(1000);
}
if ((count3%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count3 = count3 + 1;
delay(1000);
break;
}
var3++;
}
// system Undisturb for 15 min 3
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
// ……………………………………….. Step 10
{
Serial.println(“cycle 12…..”);
delay(1000);//1000
Serial.print(“System Undisturb for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer = 0;
//180 degree rotation 5
while(var4<2)
{
if ((count4%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count4 = count4 + 1;
//Serial.println(“Motor on”);
delay(1000);
}
if ((count4%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count4 = count4 + 1;
delay(1000);
break;
}
var4++;
}
// system Undisturb for 15 min 4
for (timer = 0; timer < 900; timer++) ///// Undisturb for 15 min //900
// ……………………………………….. Step 10
{
Serial.println(“cycle 12…..”);
delay(1000);//1000
Serial.print(“System Undisturb for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer = 0;
//180 degree rotation 6
while(var5<2)
{
if ((count5%2 == 0) && (digitalRead(IR) == 1))
{
digitalWrite(motor, LOW);
count5 = count5 + 1;
//Serial.println(“Motor on”);
delay(1000);
}
if ((count5%2 == 1) && (digitalRead(IR) == 1))
{
digitalWrite(motor, HIGH);
//Serial.println(“Motor off”);
count5 = count5 + 1;
delay(1000);
break;
}
var5++;
}
for (timer = 0; timer < 150; timer++) //// Water Pump ON for 50 seconds
//…………………………………………… Step12
{
Serial.println(“cycle 14…..”);
digitalWrite(water_pump, LOW);
digitalWrite(motor, HIGH);
delay(1000);//1000
Serial.print(“Water Pump ON for “);
Serial.print(timer);
Serial.println(” seconds.”);
}
timer = 0;
digitalWrite(water_pump, HIGH); ///// Water Pump OFF
Serial.println(“PUMP OFF…”);
}
}
void loop() {
}
I took a trial.
Trial 1 : sprouting a 2Kg Mataki for VA kitchen (For 36 Hours).



After 15 hours

After 36 hours.

second trial
Date- 19/01/2023
For sprouting take 2 kg green gram
In this trial I used lukewarm water.

After 15 hours

After 36 hours

Second trial better than first trial.
Comparison between Ds18B20 & BME Sensor
Assignments -9

subhash sir gave me an assignment
Comparison between Ds18B20 & BME Sensor
Smart display for temperature & humidity was made in Vigyan Ashram. Gave an assignment to see the accuracy of the sensor Ds18B 20 used in this display.
I used BME sensor to see the accuracy of Ds18B 20 sensor. Temperature & humidity comparison between Ds18B 20 sensor and BME sensor.
Components
LCD I2C
Arduino uno
BME 280 Temperature sensor
Jumper wire
Bred board
BME 280 Temperature sensor
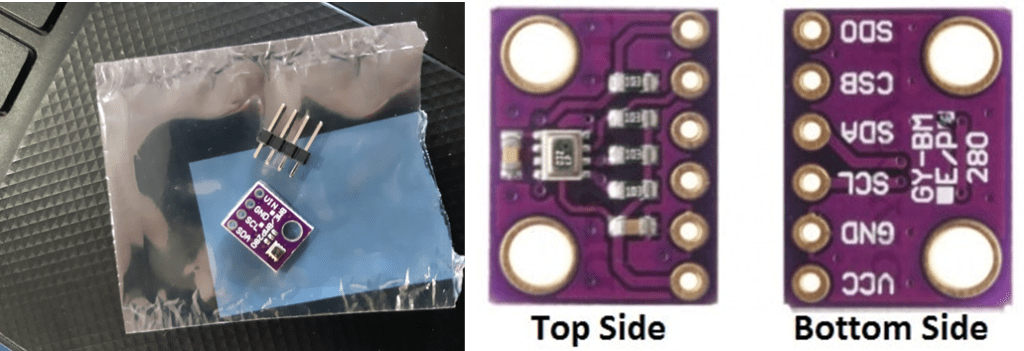
Bosch BME280 Humidity, Temperature & Pressure Sensor is an integrated environmental sensor which is very small-sized with low power consumption.This BME280 Atmospheric Sensor Breakout is the easy way to measure barometric pressure, humidity, and temperature readings all without taking up too much space. Basically, anything you need to know about atmospheric conditions you can find out from this tiny breakout.

This module uses an environmental sensor manufactured by Bosch with temperature, barometric pressure sensor that is the next generation upgrade to the popular BMP085/BMP180/BMP183 Sensor. This sensor is great for all sorts of weather sensing and can even be used in both I2C and SPI! This precision sensor from Bosch is the best low-cost, precision sensing solution for measuring barometric pressure with ±1 hPa absolute accuraccy, and temperature with ±1.0°C accuracy. Because pressure changes with altitude, and the pressure measurements are so good, you can also use it as an altimeter with ±1 meter accuracy.
Features of BME280
1. Interface: I2C & SPI
2. Supply Voltage: 1.71V to 3.6V
3. Temperature Range: -40 to +85°C
4. Humidity Range: 0% to 100% rel. humidity
5. Pressure Range: 300hPa to 1100hPa
BME280 Pinout
The BME280 I2C interface uses the following pins:
1. VCC: 1.71V to 3.6V
2. GND: Connect to GND
3. SCL: serial clock (SCK)
4. SDA: Serial data (SDI)
5. CSB: Must be connected to VDDIO to select I2C interface.
6. SDO: The I2C address decides the pin. If SDO connects to GND(0), the address is 0x76, if it connects to VDDIO(1), the address is 0x77. In this module, we have connected it to VDDIO, so the address should be 0x77.
LCD Display
True to their name, these LCDs are ideal for displaying only text/characters. A 16×2 character LCD, for example, has an LED backlight and can display 32 ASCII characters in two rows of 16 characters each.
If you look closely you can see tiny rectangles for each character on the display and the pixels that make up a character. Each of these rectangles is a grid of 5×8 pixels.
I2C LCD Adapter
At the heart of the adapter is an 8-bit I/O expander chip – PCF8574. This chip converts the I2C data from an Arduino into the parallel data required for an LCD display.
An I2C LCD has only 4 pins that connect it to the outside world. The connections are as follows:

- GND is a ground pin. Connect it to the ground of the Arduino.
- VCC supplies power to the module and LCD. Connect it to the Arduino’s 5V output or an external 5V power supply.
- SDA is the I2C data pin. Connect it to the Arduino’s I2C data pin.
- SCL is the I2C clock pin. Connect it to the Arduino’s I2C clock pin.
Connect an Arduino Uno to an I2C LCD display
Connecting an I2C LCD is much easier than connecting a standard LCD. You only need to connect 4 pins instead of 12. Start by connecting the VCC pin to the 5V output on the Arduino and GND to ground.
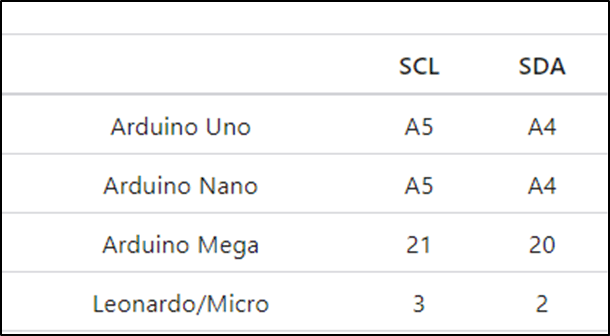
Now we are left with the pins which are used for I2C communication. Note that each Arduino board has different I2C pins that must be connected accordingly. On Arduino boards with the R3 layout, the SDA (data line) and SCL (clock line) are on the pin headers close to the AREF pin. They are also known as A5 (SCL) and A4 (SDA).
If you are using a different Arduino board, please refer to the table below.
Arduino
The Arduino is an open-source electronics platform based on easy-to-use hardware and software used to build electronics projects. All Arduino boards have one thing in common which is a microcontroller. A microcontroller is basically a really small computer.
The Arduino boards are basically a tool for controlling electronics. They are able to read inputs with their onboard microcontroller (eg. Light on a sensor, an object near a sensor) and turn it into an output (Drive a motor, ring an alarm, turn on an LED, display information on an LCD).

Connection Diagram :-
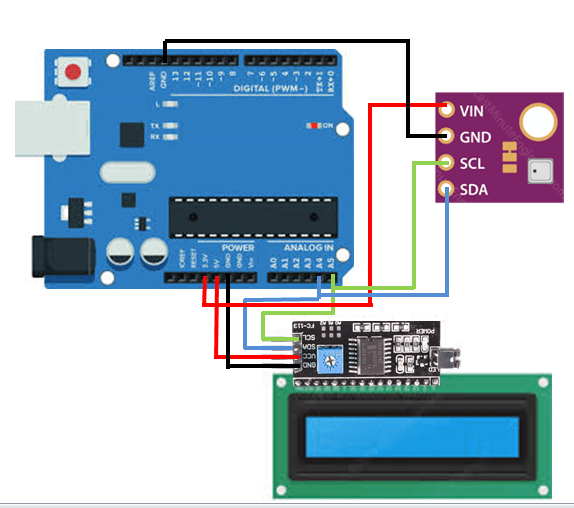
BME 280 Sensor Connection
Generally, the BME 280 sensor has at 4 pin .
GND (ground) is connected to Arduino GND pin
VCC is the supply pin which is connected to Arduino 3V pin.()
Output(SDA Serial data ) pin is serial data line, connected to Arduino pin A4.
SCL is the serial clock pin, connected to Arduino pin A5.
I2C LCD Module
Generally, the IC2 LCDModule has at 4 pin .
GND (ground) is connected to Arduino GND pin
VCC is the supply pin which is connected to Arduino 5V pin.()
Output(SDA Serial data ) pin is serial data line, connected to Arduino pin A4.
SCL is the serial clock pin, connected to Arduino pin A5.
Result :-
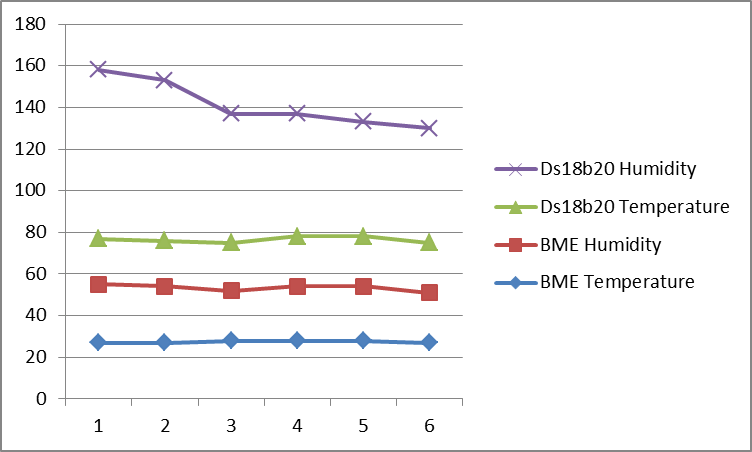
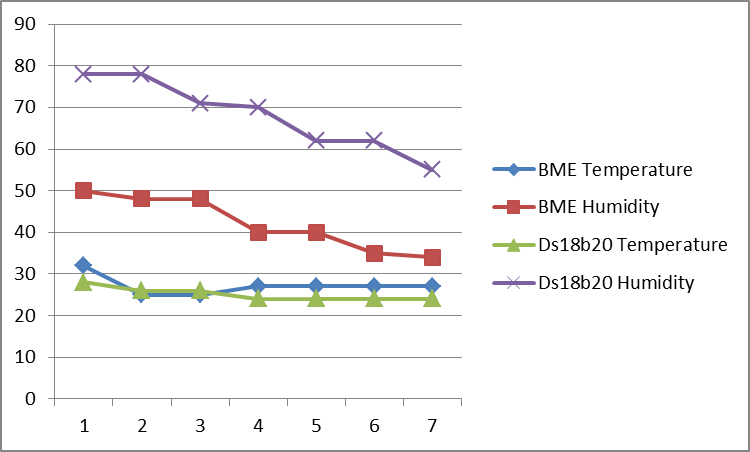

Excel sheet
conclusion
Learned the work of digital fabrication.
In this I learned to make objects with laser cutter and 3D printer.
Learned to make circuits from electronic components.
learned to use sensors.



{kind=link}