
3 Days college workshop

The third workshop for college was held from 29th Sept 2022 to 01st Oct 2022 in which 11 students of Jawaharlal Institute of Technology, Borawan participated.
These students were from different departments. In this batch there were 02 students from Mechanical branch, 06 students of Electrical branch, 03 students of Electronic branch.
We made two groups of students.
It was a three day workshop. In this, on the first day, information about the machines were given to the students and all the software related to it were taught to the students.
Projects
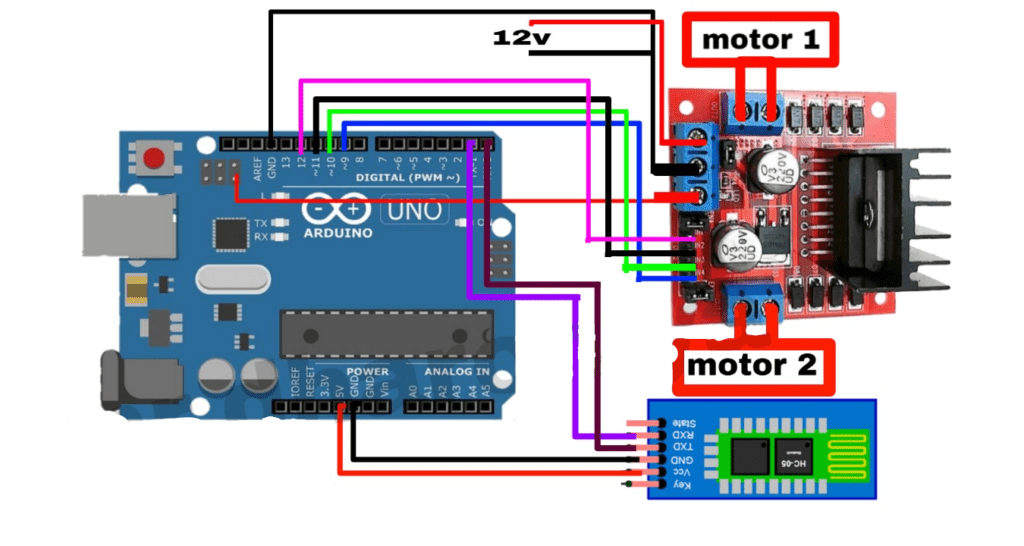
1.bluetooth control Robot
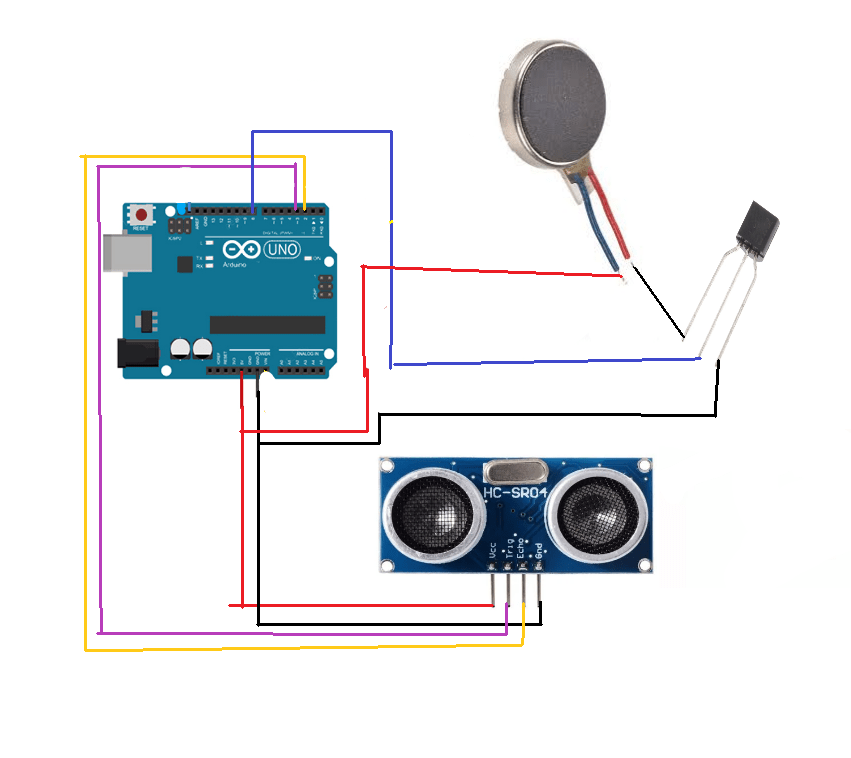
2.Smart stick
Bluetooth control Robot
circuit diagram
code
// Starting of Program
int m1a = 9;
int m1b = 10;
int m2a = 11;
int m2b = 12;
char val;
void setup()
{
pinMode(m1a, OUTPUT); // Digital pin 10 set as output Pin
pinMode(m1b, OUTPUT); // Digital pin 11 set as output Pin
pinMode(m2a, OUTPUT); // Digital pin 12 set as output Pin
pinMode(m2b, OUTPUT); // Digital pin 13 set as output Pin
Serial.begin(9600);
}
void loop()
{
while (Serial.available() > 0)
{
val = Serial.read();
Serial.println(val);
}
if( val == 'F') // Forward
{
digitalWrite(m1a, HIGH);
digitalWrite(m1b, LOW);
digitalWrite(m2a, HIGH);
digitalWrite(m2b, LOW);
}
else if(val == 'B') // Backward
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, HIGH);
digitalWrite(m2a, LOW);
digitalWrite(m2b, HIGH);
}
else if(val == 'L') //Left
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, LOW);
digitalWrite(m2a, HIGH);
digitalWrite(m2b, LOW);
}
else if(val == 'R') //Right
{
digitalWrite(m1a, HIGH);
digitalWrite(m1b, LOW);
digitalWrite(m2a, LOW);
digitalWrite(m2b, LOW);
}
else if(val == 'S') //Stop
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, LOW);
digitalWrite(m2a, LOW);
digitalWrite(m2b, LOW);
}
else if(val == 'I') //Forward Right
{
digitalWrite(m1a, HIGH);
digitalWrite(m1b, LOW);
digitalWrite(m2a, LOW);
digitalWrite(m2b, LOW);
}
else if(val == 'J') //Backward Right
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, HIGH);
digitalWrite(m2a, LOW);
digitalWrite(m2b, LOW);
}
else if(val == 'G') //Forward Left
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, LOW);
digitalWrite(m2a, HIGH); digitalWrite(m2b, LOW);
}
else if(val == 'H') //Backward Left
{
digitalWrite(m1a, LOW);
digitalWrite(m1b, LOW);
digitalWrite(m2a, LOW);
digitalWrite(m2b, HIGH);
}
}

Smart Stick
circuit diagram
code
const int trigPin = 3;
const int echoPin = 2;
const int motorPin = 8;
long duration;
int distance;
int safetyDistance;
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
pinMode(motorPin, OUTPUT);
Serial.begin(9600);
}
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance= duration*0.034/2;
safetyDistance = distance;
if (safetyDistance <= 30)
{
digitalWrite(motorPin, HIGH);
}
else{
digitalWrite(motorPin, LOW);
}
Serial.print(“Distance: “);
Serial.println(distance);
}
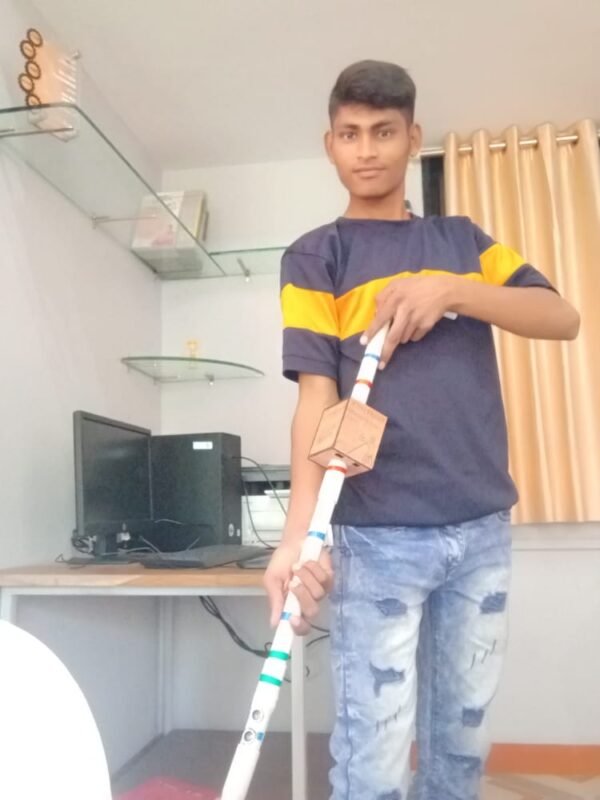
Photo Gallery







{kind=link}