Introduction
This project is in the continuity of Prathamesh Darwade’s project called “LABOUR SUPPORT USING EXOSKELETON”. To sum up, the main objective is to support at least partially the repetitive or long tasks that require constant stress on muscles. For example, he and his team developed a biceps and a shoulder support device to help maintain an overhead posture of the arms for a long period. These projects have for the moment focused on the upper limbs. The goal of this project is to create a passive assistance exoskeleton for the lower limbs, to help with the lifting of heavy weight, which can cause a lot of stress on the back and the legs. Indeed, severe back problems can occur by lifting repetitively heavy charges with a bad posture or for a long period of time.
Existing technologies
Prior to developing a device, one must check the available technologies, and try to understand their main advantages as well as drawbacks in order to get the maximum benefits from them. For lower limb/back support on the passive exoskeleton, I decided to check public papers as their technologies will be open source and very detailed.
Passive Back Support Exoskeleton Improves Range of Motion Using Flexible Beams
Design of a Passive Spine Exoskeleton
Those two papers are the main sources of inspiration for this project, as they were focusing and the exact same problem as ours and have two different approaches to solving this issue.
How to solve the issue
The first to do is to clearly define the problem, what to solve, and how to solve it efficiently?
By looking at the paper, I understood that the human body has two sets of joints that were solicited while lifting a charge. The first one is the hip and the second one is the spinal cord. Indeed, both paper has a different mechanism to compensate for each, which are completely independent of each other.
This project can be then separated into two devices, one helping the spinal cord straighten up in the vertical position after bending, and the second one helping the hip to achieve the stand-up after a squat position. After discussion with different coworkers, we decided to start by working on the hip exo as having only the spinal support would incline users to use furthermore their spinal muscles which would lead to even the most severe problems.
Design and calculation
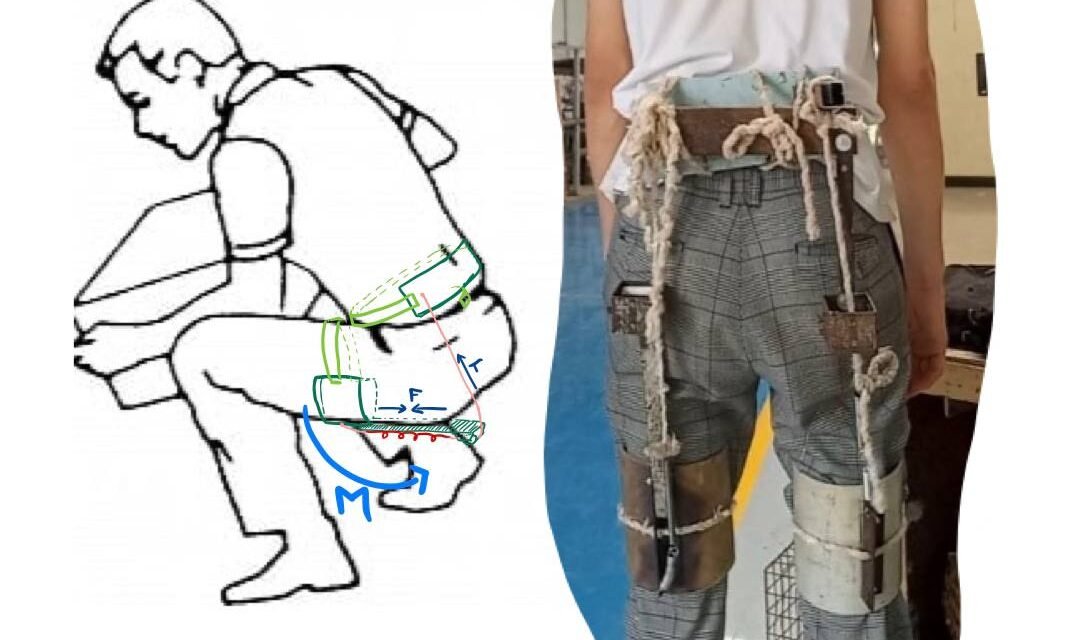
As explained above, the first created assisting device would only focus on the hip motion, the final design had two possible implementations that the following sketches depict. When squatting, the spring elongates because the path followed is becoming longer. A force is then applied to the rope which creates a torque helping the user get up.

The main differences between those two implementations would be in comfort and usability. For instance, the first one might be uncomfortable while walking as a straight bar might restrain the motion.
Prior to the construction of this device, I made a small analysis of the torque that should be generated and the extension encountered by the spring. This would then help me choose the adequate spring when buying one.

I have now calculating the elongation of the spring for both implementation, only one in displayed because calculation and results are very similar

Based on this observation, the chosen spring must be able to elongate without deformation at around 15 cm, which is important to take into account.
Finally, before the first real construction, I made a smaller cardboard proof of concept to test the functioning

First prototype
Now that everything is working in theory, I need to build it for real in order to test the support by myself. I started working, cutting, and assembling all the parts, which was completely new to me. I have built the two implementations described earlier to test which one offers the best comfort, usability, and support.
Concerning the comfort and usability, the first one was clearly the best one as it tends less to move and go to undesirable positions while applying the torque
For this first prototype, I only used springs that were available in the workshop, which clearly do not offer the needed spring constant for my application. I then had to go and buy more spring to improve my device.



As we can observe in the videos, the second design tends to create undesirable positions as a lot of torque is built on the hip belt. Although this torque is directed on the upper leg of the second design, which causes fewer problems.
*
Improvements
After having tested the two mechanisms, I have chosen to keep the first one, as it is more stable and robust to perturbations.
I then designed the second leg as the first one to have a similar design on both. I have made minor adjustments and changes to create a more comfortable wearable, by adding webbing and adjustments system.
I have also bought other springs to try to create a more powerful device. However, the new springs were too stiff for the device and the generated torque was damaging it instead of behind very useful. My solution, before going to buy even more springs and maybe to the same mistakes, was to create the perfect stiffness by combining the available springs. I have achieved a satisfactory result and obtained the following.
The exoskeleton provides also good support when climbing stairs.
During testing, it has been observed that the support is indeed more efficient when climbing stairs than really supporting the squat motion. Indeed, a lot of force is applied to lift you up but the same force is applied to lower the hip belt or move the thigh. You must tight a lot more each attach to have a satisfactory result. However, when climbing stairs, only one leg receive support at the same time, so the belt is less prone to move and the support is indeed way better.



{kind=link}